Content
Linear transformations and matrices
We will now take a more algebraic approach to transformations of the plane.
As it turns out, matrices are very useful for describing transformations. Whenever we have a $2 \times 2$ matrix of real numbers
\[ M = \begin{bmatrix} a & b \\ c & d \end{bmatrix}, \]we can naturally define a plane transformation $T_M : \mathbb{R}^2 \rightarrow \mathbb{R}^2$ by
\[ T_M ({\bf v}) = M {\bf v}. \]That is, $T_M$ takes a vector ${\bf v}$ and multiplies it on the left by the matrix $M$. If ${\bf v}$ is the position vector of the point $(x,y)$, then
\[ T_M ({\bf v}) = T_M \left( \begin{bmatrix} x \\ y \end{bmatrix} \right) = M \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} ax+by \\ cx+dy \end{bmatrix} \]or equivalently, $T_M (x,y) = (ax+by, cx+dy)$.
(Note that here we used the notation $(x,y)$ and $\begin{bmatrix} x \\ y \end{bmatrix}$ interchangeably; we will be doing this throughout this module.)
As it turns out, matrices give us a powerful systematic way to describe a wide variety of transformations: they can describe rotations, reflections, dilations, and much more.
Example
Let $M = \begin{bmatrix} 1 & 2 \\ 3 & 7 \end{bmatrix}$.
- Write an expression for $T_M$.
- Find $T_M(1,0)$ and $T_M(0,1)$.
- Find all points $(x,y)$ such that $T_M (x,y) = (1,0)$.
Solution
- $T_M(x,y) = \begin{bmatrix}1 & 2 \\ 3 & 7 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} x+2y \\ 3x+7y \end{bmatrix} = (x+2y,3x+7y)$.
- Using the formula from the previous part, $T_M(1,0) = (1,3)$ and $T_M(0,1) = (2,7)$
- We have $T_M(x,y) = (x+2y,3x+7y) = (1,0)$, hence the simultaneous equations \[ x+2y =1, \quad 3x+7y = 0.\] Solving these equations yields $x=7, y=-3$; and this is the only solution. So the only point $(x,y)$ such that $T_M(x,y) = (1,0)$ is $(x,y)=(7,-3)$.
Note that $T_M(1,0)$ and $T_M(0,1)$ are precisely the columns of the matrix $M$. This is an important fact, which we will discuss later.
While every matrix describes a plane transformation, not every plane transformation can be described by a matrix. Matrices correspond to a specific type of plane transformation which sends $(x,y)$ to $(ax+by,cx+dy)$, for some real numbers $a,b,c,d$.
A transformation $T_M$ arising from a matrix $M$ obeys some "distributive laws". For any $2 \times 2$ matrix $M$ and vectors ${\bf v}$ and ${\bf w}$ in $\mathbb{R}^2$, it is true that
\[ M \left( {\bf v} + {\bf w} \right) = M {\bf v} + M {\bf w} \quad \text{and hence} \quad T_M \left( {\bf v} + {\bf w} \right) = T_M ({\bf v}) + T_M ({\bf w}). \]Moreover, for any real number (scalar) $c$,
\[ M \left( c {\bf v} \right) = c M {\bf v} \quad \text{and hence} \quad T_M \left( c {\bf v} \right) = c T_M ( {\bf v} ). \]In fact, if a function $F: \mathbb{R}^2 \rightarrow \mathbb{R}^2$ satisfies these two distributive laws, then it must arise from a matrix. Why? If $F({\bf v} + {\bf w}) = F({\bf v}) + F({\bf w})$ and $F(c{\bf v}) = cF({\bf v})$, then for any point $(x,y)$,
\begin{align*} F \begin{bmatrix} x \\ y \end{bmatrix} &= F \left( \begin{bmatrix} x \\ 0 \end{bmatrix} + \begin{bmatrix} 0 \\ y \end{bmatrix} \right) = F \begin{bmatrix} x \\ 0 \end{bmatrix} + F \begin{bmatrix} 0 \\ y \end{bmatrix} \quad \text{(using $F({\bf v} + {\bf w}) = F({\bf v}) + F({\bf w})$)} \\ &= x F \begin{bmatrix} 1 \\ 0 \end{bmatrix} + y F \begin{bmatrix} 0 \\ 1 \end{bmatrix} \quad \text{(using $F(c{\bf v}) = cF({\bf v})$)} \end{align*}Letting $F(1,0) = (a,c)$ and $F(0,1) = (b,d)$ then, we have
\[ F \begin{bmatrix} x \\ y \end{bmatrix} = x \begin{bmatrix} a \\ c \end{bmatrix} + y \begin{bmatrix} b \\ d \end{bmatrix} = \begin{bmatrix} ax+by \\ cx+dy \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}, \]so $F$ corresponds to a matrix.
Therefore, we have two equivalent ways to define linear transformations.
Definition
A plane transformation $F$ is linear if either of the following equivalent conditions holds:
- $F(x,y) = (ax+by,cx+dy)$ for some real $a,b,c,d$. That is, $F$ arises from a matrix.
- For any scalar $c$ and vectors ${\bf v}, {\bf w}$, $F(c{\bf v}) = c F({\bf v})$ and $F({\bf v} + {\bf w}) = F({\bf v}) + F({\bf w})$.
Exercise 2
Show that any linear transformation sends the origin to the origin.
The effect of a linear transformation
Suppose you are given a matrix $M$. You now know that $M$ determines a linear transformation $T_M$. But what does $T_M$ do, geometrically? We will now see a method to analyse this question.
Let's begin by restricting our attention to two vectors: $(1,0)$ and $(0,1)$. These two vectors are sometimes called the standard basis for $\mathbb{R}^2$.
Multiplying any matrix $M = \begin{bmatrix} a & b\\ c & d \end{bmatrix}$ by the standard basis vectors gives its columns: \[ M \begin{bmatrix} 1 \\ 0 \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} 1 \\ 0 \end{bmatrix} = \begin{bmatrix} a \\ c \end{bmatrix} \quad \text{and} \quad M \begin{bmatrix} 0 \\ 1 \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} 0 \\ 1 \end{bmatrix} = \begin{bmatrix} b \\ d \end{bmatrix}. \]So, just by looking at a matrix $M$, reading down its columns, you can see where $T_M$ sends $(1,0)$ and $(0,1)$. Once you know where $T_M$ sends $(1,0)$ and $(0,1)$, you can use the "distributive" property of linear transformations to see where any other point goes.
For instance, if you want to know where $T_M$ sends $(2,3)$, you could note that $(2,3) = 2 (1,0) + 3 (0,1)$, so that
\[ T_M(2,3) = 2 T_M (1,0) + 3 T_M (0,1). \]Hence $T_M (2,3)$ is given by $2$ times the first column of $M$, plus $3$ times the second column.
In the $xy$-plane we can consider the unit square, with vertices $(0,0), (1,0), (0,1), (1,1)$. Unit squares tiles the plane, giving a tessellation whose vertices are precisely the points with integer coordinates. Where does $T_M$ send these points?
- $T_M$ sends the origin to the origin (exercise 2).
- $T_M$ sends $(1,0)$ and $(0,1)$ to the vectors given by the first and second columns of $M$.
- $T_M$ sends $(1,1) = (1,0) + (0,1)$, to $T_M(1,0) + T_M(0,1)$, the sum of the two columns of $M$.
- In general, $T_M$ sends $(a,b)$ to $a T_M(1,0) + b T_M (0,1)$.
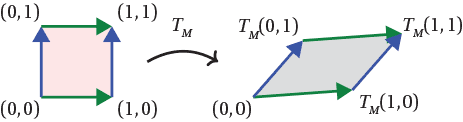
So the unit square is sent by $T_M$ to a parallelogram. The distributive property implies that the whole tessellation of the plane by unit squares is sent by $T_M$ to a tessellation of the plane by parallelograms. We can then draw a picture of the entire transformation $T_M$.
Let us now use these ideas to describe some specific linear transformations.
Example
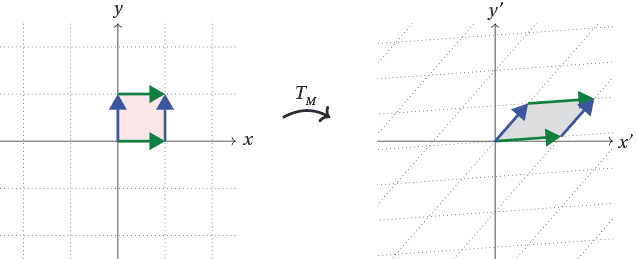
Let $M = \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix}$. Describe the linear transformation $T_M$ geometrically.
Solution
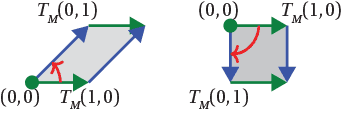
Reading the columns of $T_M$ tells us that $T_M(1,0) = (1,0)$ and $T_M(0,1) = (1,1)$; the transformation $T_M$ thus turns the unit square into a parallelogram with base $1$ and height 1 as shown. This transformation is called a shear.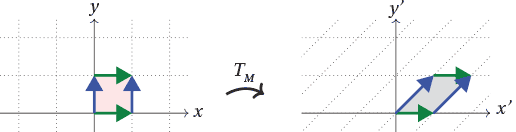
In the above figure, we draw a parallelogram (shaded grey) with two vectors ${\bf v} = T_M(1,0)$ (green) and ${\bf w} = T_M(0,1)$ (blue) tail-to-tail at the origin. We call this the parallelogram spanned by ${\bf v}$ and ${\bf w}$.
Example
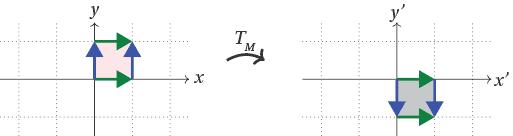
Let $M = \begin{bmatrix} 1 & 0 \\ 0 & -1 \end{bmatrix}$. Describe the linear transformation $T_M$ geometrically.
Solution
Reading the columns of $M$, we have $T_M (1,0) = (1,0)$ and $T_M (0,1) = (0,-1)$. So $T_M$ fixes $(1,0)$ and "flips" $(0,1)$ to its negative $(0,-1)$. Thus vertical directions are "flipped", so that $(x,y)$ is sent to $(x,-y)$, and $T_M$ is reflection in the $x$-axis.
Note that in the two examples above, the parallelograms spanned by $T_M(1,0)$ and $T_M(0,1)$ have different orientations. In the first example, if we consider sweeping around the origin, through the parallelogram, from $T_M(1,0)$ to $T_M(0,1)$, we go anticlockwise; in the second example, we go clockwise. Accordingly, we say the first parallelogram is positively oriented, and the second is negatively oriented.
In the standard unit square, sweeping around the origin from $(1,0)$ to $(0,1)$ goes anticlockwise, so it is positively oriented. So the first example preserved this orientation, and the second example reversed it. In general, we say a linear transformation preserves or reverses orientation accordingly as the parallelogram spanned by $T_M (1,0)$ and $T_M(0,1)$ is positively or negatively oriented.
Exercise 3
For each matrix $M$ below, describe the linear transformation $T_M$ geometrically.
\[ \begin{bmatrix} \frac{1}{2} & - \frac{\sqrt{3}}{2} \\ \frac{\sqrt{3}}{2} & \frac{1}{2} \end{bmatrix}, \quad \begin{bmatrix} 7 & 0 \\ 0 & 7 \end{bmatrix}, \quad \begin{bmatrix} -1 & 0 \\ 0 & -1 \end{bmatrix}, \quad \begin{bmatrix} 2 & 0 \\ 0 & 3 \end{bmatrix}, \quad \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix}. \]Composing linear transformations and matrix multiplication
Let's now suppose we have two matrices $M,N$ representing two linear transformations $T_M, T_N$. What happens if we apply one transformation then the other? What is the composition $T_M \circ T_N$?
Let $M = \begin{bmatrix} a & b \\ c & d \end{bmatrix}$ and $N = \begin{bmatrix} e & f \\ g & h \end{bmatrix}$. So
\[ T_M (x,y) = (ax+by, cx+dy) \quad \text{and} \quad T_N (x,y) = (ex+fy, gx+hy). \]Composing these two functions gives
\begin{align*} T_M \circ T_N (x,y) &= T_M ( T_N (x,y) ) = T_M ( ex+fy, gx+hy ) \\ &= \left( a (ex+fy) + b (gx+hy), \; c (ex+fy) + d (gx+hy) \right) \\ &= \left( (ae+bg) x + (af+bh) y, \; (ce+dg) x + (cf+dh) y \right). \end{align*}Remembering that $a,b,c,d,e,f,g,h$ are just real constants, this is another linear transformation, and the corresponding matrix is
\[ \begin{bmatrix} ae+bg & af+bh \\ ce+dg & cf+dh \end{bmatrix}. \]This matrix is precisely the product of the two matrices $M$ and $N$:
\[ MN = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} e & f \\ g & h \end{bmatrix} = \begin{bmatrix} ae+bg & af+bh \\ ce+dg & cf+dh \end{bmatrix}. \]We conclude that the composition of the linear transformations of $M$ and $N$ is the linear transformation of $MN$, proving the following theorem.
Theorem
For any matrices $M$ and $N$, $T_M \circ T_N = T_{MN}$.
\(\Box\)
This theorem gives us a very quick way to compose linear transformations: just multiply the corresponding matrices!
Example
Find the matrix for the composition $g \circ f$ of the two linear transformations $f(x,y) = (x+y,y)$ and $g(x,y) = (y,x+y)$.
Solution
We have $f = T_M$ and $g = T_N$ where $M = \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix}$ and $N = \begin{bmatrix} 0 & 1 \\ 1 & 1 \end{bmatrix}$. So the matrix of the composition $g \circ f = T_N \circ T_M = T_{NM}$ is the product $NM$:
\[ NM = \begin{bmatrix} 0 & 1 \\ 1 & 1 \end{bmatrix} \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ 1 & 2 \end{bmatrix}. \]Exercise 4
Show that if the linear transformation $f(x,y) = (y,-x+y)$ is composed with itself six times, the result is the identity transformation.
The identity transformation and identity matrix
Recall the identity transformation $I: \mathbb{R}^2 \rightarrow \mathbb{R}^2$ sends every point to itself, $I(x,y) = (x,y)$. We can now note $I$ is a linear transformation, corresponding to the identity matrix
\[ \text{Id} = \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix}. \quad \text{In other words,} \quad T_{\text{Id}} = I. \]The inverse of a linear transformation and inverse matrices
Recall that a function has an inverse if and only if it is bijective, i.e. injective and surjective. (A function $f: X \rightarrow Y$ is injective if $x \neq y$ implies $f(x) \neq f(y)$; and $f$ is surjective if its image is all of $Y$, i.e. for all $y \in Y$ there exists $x \in X$ such that $f(x) = y$.)
Some transformations of the plane are bijective, and some are not; so some have inverses, and others do not. As we proceed, we will see many examples of transformations that have inverses, and many that don't.
A bijective transformation $F: \mathbb{R}^2 \rightarrow \mathbb{R}^2$, has an inverse $F^{-1} : \mathbb{R}^2 \rightarrow \mathbb{R}^2$. These functions $F$ and $F^{-1}$ "undo" each other. So if $F({\bf x}) = {\bf y}$ then $F^{-1}({\bf y}) = {\bf x}$, and vice versa.
Recall that matrices can have inverses too. If
\[ M = \begin{bmatrix} a & b \\ c & d\end{bmatrix} \quad \text{then} \quad M^{-1} = \frac{1}{ad-bc} \begin{bmatrix} d & -b \\ -c & a \end{bmatrix} \quad \text{(provided $ad-bc \neq 0$).} \]We say $M^{-1}$ is the inverse of $M$ because $M$ and $M^{-1}$ multiply to give the identity.
Exercise 5
Verify that $MM^{-1} = M^{-1} M = \text{Id}$.
If we compose the linear transformations $T_M$ and $T_{M^{-1}}$, we obtain the identity:
\[ T_M \circ T_{M^{-1}} = T_{MM^{-1}} = T_{\text{Id}} = I, \quad T_{M^{-1}} \circ T_M = T_{M^{-1} M} = T_{\text{Id}} = I. \]Hence $T_M$ and $T_{M^{-1}}$ undo each other; they are inverse transformations.
Example
What is the inverse of the transformation $F: \mathbb{R}^2 \rightarrow \mathbb{R}^2$ given by $F(x,y) = (x+3y, x+5y)$?
Solution
The transformation $F$ is linear and corresponds to the matrix
\[ M = \begin{bmatrix} 1 & 3 \\ 1 & 5 \end{bmatrix}, \quad \text{which has inverse} \quad M^{-1} = \frac{1}{1 \cdot 5 - 3 \cdot 1} \begin{bmatrix} 5 & -3 \\ -1 & 1 \end{bmatrix} = \begin{bmatrix} \frac{5}{2} & \frac{-3}{2} \\ \frac{-1}{2} & \frac{1}{2} \end{bmatrix}. \]The inverse of $F = T_M$ is then $F^{-1}= T_{M^{-1}}$,
\[ F^{-1}(x,y) = \left( \frac{5}{2} x - \frac{3}{2} y, \; \frac{-1}{2} x + \frac{1}{2} y \right). \]To show that a function does not have an inverse, one can show that it is not injective, or that it is not surjective. In the following example we do both, giving two solutions.
Example
Show that the transformation $F: \mathbb{R}^2 \rightarrow \mathbb{R}^2$ given by $F(x,y) = (x,0)$ has no inverse.
Solution
Solution 1. Since (for instance) $F(0,0) = F(0,1) = (0,0)$, $F$ is not injective. Hence $F$ has no inverse.
Solution 2. Any point in the image of $F$ has second coordinate zero. So there is no $(x,y)$ such that (for instance) $F(x,y) = (0,1)$. Hence $F$ is not surjective, and has no inverse.
Exercise 6
Show that $F: \mathbb{R}^2 \rightarrow \mathbb{R}^2$ given by $F(x,y) = (x+2y, 2x+4y)$ has no inverse.
The following example illustrates a useful technique for finding a linear transformation, from its value at two points.
Example
Find a linear transformation $\mathbb{R}^2 \rightarrow \mathbb{R}^2$ that maps $(1,1)$ to $(-1,4)$ and $(-1,3)$ to $(-7,0)$
Solution
Let $M$ be the matrix of the desired linear transformation. We have
\[ M \begin{bmatrix} 1 \\ 1 \end{bmatrix} = \begin{bmatrix} -1 \\ 4 \end{bmatrix} \quad \text{and} \quad M \begin{bmatrix} -1 \\ 3 \end{bmatrix} = \begin{bmatrix} -7 \\ 0 \end{bmatrix}. \]In fact, we can put these two equations together into a single matrix equation
\[ M \begin{bmatrix} 1 & -1 \\ 1 & 3 \end{bmatrix} = \begin{bmatrix} -1 & -7 \\ 4 & 0 \end{bmatrix} \] which we can then solve for $M$: \[ M = \begin{bmatrix} -1 & -7 \\ 4 & 0 \end{bmatrix} \begin{bmatrix} 1 & -1 \\ 1 & 3 \end{bmatrix}^{-1} = \frac{1}{4} \begin{bmatrix} -1 & -7 \\ 4 & 0 \end{bmatrix} \begin{bmatrix} 3 & 1 \\ -1 & 1 \end{bmatrix} = \frac{1}{4} \begin{bmatrix} 4 & -8 \\ 12 & 4 \end{bmatrix} = \begin{bmatrix} 1 & -2 \\ 3 & 1 \end{bmatrix} \]Hence the only such transformation is $T_M(x,y) = (x-2y, 3x+y)$.
Exercise 7
Find the linear transformation that sends $(3,1)$ to $(1,2)$ and $(-1,2)$ to $(2,-3)$
Next page - Content - Describing geometric transformations algebraically
| These materials have been developed in collaboration with the Victorian Curriculum and Assessment Authority. © VCAA and The University of Melbourne on behalf of AMSI 2015 |
Contributors Term of use |